Robotics is an inherently multidisciplinary field that pulls insights from a variety of different fields and subjects. With this in mind, I have explored several facets of being a roboticist through my projects.
Incorporating Behavior Prediction into MPC for Autonomous Driving Scenarios
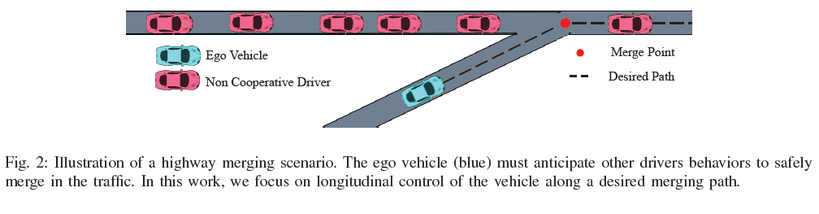
This work was done as part of AA203: Optimal and Learning-based Control in collaboration with Maxime Boutin and Michael Kelly. In order to drive safely and effectively, autonomous cars must be able to interact with human road users. This task is made challenging by the tremendous behavioral variability across human drivers, which can create complicated and highly stochastic dynamics. A standard technique from the control literature used to handle such challenging dynamics is model predictive control, which, by re-computing open-loop plans with respect to some internal model at each time step, gains some measure of robustness against modeling errors. In this work, we explore the extent of this robustness within the setting of autonomous driving, examining the extent to which accurate behavioral models are needed for effective model predictive control in a pair of highway driving scenarios. We
find that the performance of MPC controllers is still quite sensitive to model misspecification in this setting.
find that the performance of MPC controllers is still quite sensitive to model misspecification in this setting.
Adversarial Attacks on Image Recognition
|
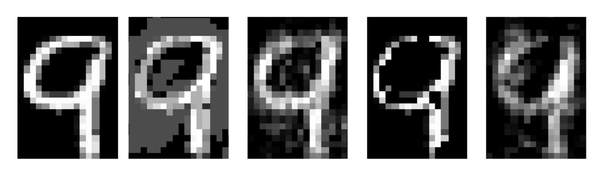
Completed as part of CS229: Machine Learning in partnership with Yu Wu, this project extends the work done by Papernot et al. on adversarial attacks in image recognition. We investigated whether a reduction in feature dimensionality using principal component analysis (PCA) can maintain a comparable level of misclassification success while increasing computational efficiency. We attacked black-box image classifiers trained on the MNIST dataset by forcing the oracle to misclassify images that were modified with small perturbations. The method we used was two-fold: the target classifier was imitated with a substitute logistic regression model and then the adversarial samples were generated off of the substitute model. The results show that reasonable misclassification rates with reduced computation time can be achieved for a PCA-reduced feature set utilizing the Papernot adversarial crafting algorithm.
|
|
Controlling Soft Robots with POMCP
|
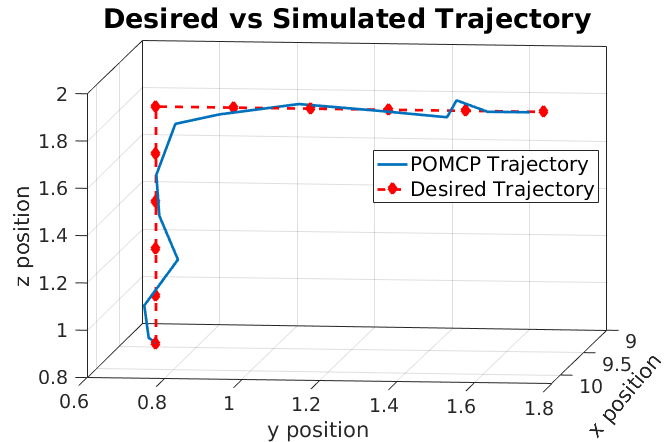
This paper was done as the final project for AA228: Decision Making Under Uncertainty at Stanford in partnership with Spenser Anderson. We present a method for using the Partially Observable Monte-Carlo Planning (POMCP) algorithm for solving Partially Observable Markov Decision Processes (POMDPs) to determine control inputs for a soft surgical robot. The problem of a surgical catheter following a prescribed trajectory is framed as a POMDP with 5-dimensional continuous state and action spaces. The POMCP algorithm is extended to this continuous action space with Double-Progressive Widening (DPW) and a Sampling Importance Resampling (SIR) particle filter, using the open-source library POMDPs.jl. Numerical experiments show that the algorithm is able to follow a 2mm-long L-shaped trajectory with an average error of 0.0359mm. The algorithm takes about 15 seconds to move each 0.1mm increment along the trajectory. Although the POMCP framework produces results with a high level of accuracy, the efficiency of the procedure would likely need improvement before it could be considered viable in a surgical setting.
|
Renault R&D Internship
|
I had the pleasure to work with a wonderful team of interns and researchers within the Nissan-Renault Alliance. I worked on a code architecture to facilitate the connection between the perception and planning systems for a self-driving car prototype. The code was successfully tested in simulation and on an experimental vehicle.
|

|
Turtlebot Maze
|
As part of the AA274: Robot Autonomy course at Stanford, we successfully implemented the full autonomy stack in Python/ROS on a Turtlebot to navigate a maze and stop by all the required tags on the mission.
|
Towards Multi-Agent Learning
|
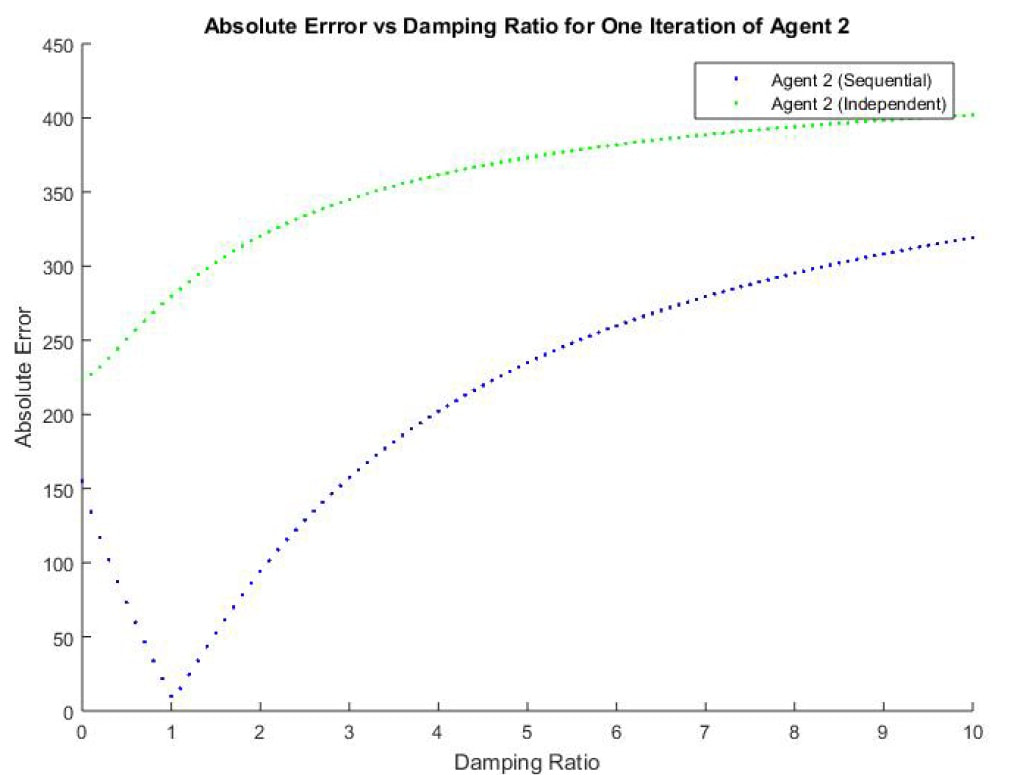
Under the supervision of Prof. Angela Schoellig at the University of Toronto, I completed an undergraduate thesis on iterative learning for multi-agent robotic systems. I explored sequential learning control for a second-order, noiseless system of two agents. I demonstrated through both theory and simulation that sequential transfer of information between two distinct agents with known dynamics significantly improves the performance of an individual agent.
|
|
